Notizie
Commento: misurare la distanza con il sensore di distanza VL53L1X della ST

La creazione di immagini "a colori" non è nuova. Il sensore Kinect di Microsoft ha introdotto gli sviluppatori per ottenere informazioni spaziali: un trucco che STMicroelectronics ora rende gestibile tramite i suoi monoliti basati su sensori di distanza basati su laser, che sono ideali per sensori di atterraggio drone, accenditori sensibili alla distanza e altri ninnoli.
Tutto in uno…
A differenza del sensore utilizzato nel Kinect, il sensore della ST è "monodimensionale". La finestra ottica nella parte superiore del chip funge da mirino e emettitore, mentre la distanza dagli "oggetti" davanti al rilevatore viene restituita come valore unidimensionale (si pensi: qualcosa è a 50 cm di distanza da me).
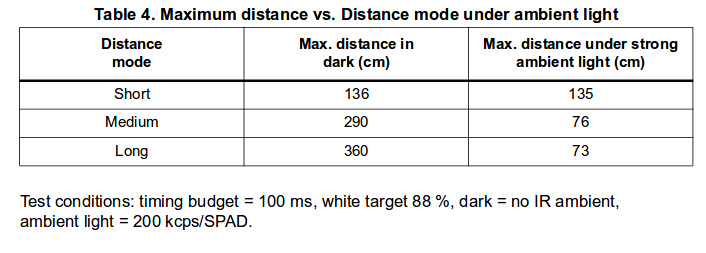
Inoltre, l'uso della tecnologia laser rende il sistema quasi completamente indipendente dal materiale target - i problemi legati al colore noti dai componenti IR classici non dovrebbero verificarsi qui.
La connettività Host-Sensor viene realizzata tramite il bus I2C: purtroppo, la ST non espone un selettore di indirizzi, limitando in questo modo a un sensore per controllore di bus. L'attuale protocollo di comunicazione è descritto in un documento separato: come ST ama cambiare i suoi schemi di URL, semplicemente google per UM2356 per trovarlo - (ma "pur non esponendo alcun selettore di indirizzo nell'hardware, è possibile selezionare l'indirizzo tramite i comandi durante l'avvio del sensore", secondo un commento postato di seguito da Martin Palsson, che ha incluso più dettagli (scorrere verso il basso)).
Inoltre, un autista scritto in C è messo a disposizione per aiutare gli esecutori.
Mentre il consumo di corrente è moderato nell'intervallo inferiore a 20 mA quando è attivo, gli utenti devono essere consapevoli della tensione di alimentazione massima di 3V5. Ciò rende difficile l'integrazione del sistema in bus I2C 5V - un level shifter composto da due FET è una soluzione alternativa (vedere directionalLevelShiftere Nota applicativa).
Calmami!
La maggior parte dei sensori richiede modifiche al design del case: senza un ritaglio "da cui guardare fuori", si verificano tutti i tipi di strani problemi. ST semplifica questo con una routine di calibrazione dedicata, che dovrebbe essere eseguita su ogni unità in fabbrica. Ciò elimina anche le differenze ottiche individuali nella "finestra" e tiene conto di eventuali cambiamenti causati dal riflusso.
Un altro aspetto interessante è la possibilità di impostare la "regione di interesse". Mentre il campo visivo, per impostazione predefinita, è piuttosto ampio, è possibile sintonizzare l'array ottico per limitarlo. In una strana somiglianza con il suddetto Kinect, anche l'intervallo di rilevamento è specificato in "classi".
L'unico svantaggio della parte è l'impronta insanamente piccola. La ST usa un case senza piombo (Optical LGA) che è piccolo 4.9 × 2.5 × 1.56 mm: mentre il pacchetto può essere ridimensionato con facilità, adattarlo a un prototipo usando una stazione di saldatura è al limite impossibile.
Come con tutti i nuovi chip, la disponibilità è un problema. Su OEMsecrets, i prezzi vanno da 2,8 € a 5 € in piccole quantità - come sempre, un confronto dei prezzi è l'amico del tuo portafoglio. Vedi sotto!
Ing. Tam HANNA ... ha lavorato nello spazio embedded dal momento in cui il PIC 16F84A era caldo. Dopo alcuni anni di mobile computing, la sua società di consulenza Tamoggemon Holding k.s. si è focalizzato sul design dell'hardware.
Guarda anche: Il sensore ST ToF estende il raggio di rilevamento di FlightSense a 4 m